FULLTEXT: PDF HTML REFERENCE: BibTeX EndNote DOI: 10.1109/CMPSAC.2004.1342840
Component-wise Mapping of Media-needs
to a Distributed Presentation Environment
2 Preliminaries
3 Specification
4 Presentation resources
5 Mapping
6 Correctness
7 Concluding remarks
Acknowledgement
References
1 Introduction
In the vision of Ambient Intelligence, technology becomes invisible, embedded in our natural surroundings, present whenever we need it, enabled by simple and effortless interactions, attuned to all our senses, adaptive to users and context and autonomously acting [1]. Interactive media presentations will no longer be folded in a flat screen with 5.1 speakers, but instead, will be distributed into the user’s environment. The environment with distributed and networked interfaces, functioning as interactive theater, will engage people in more immersive experiences. In a previous study done in Philips Electronics, we have shown how to structure the content and system to present interactive media to a distributed environment that consists of not only screens and speakers, but also lights and robots [7, 6]. It was done in the context of EU funded R&D projects (NexTV [11] and ICE-CREAM [9]). (Figure 1 shows two users interacting with the ICE-CREAM demonstration, exhibited in IBC 2003 [8]).

One of the problems is the variety of such environments - thinking of how different people arrange their living rooms. This has been a long-existing problem with regard to web browsers. In order to give the same look-and-feel on a single web page to the users, the poor authors often have to work very hard to use all kinds of tricks, and when this fails, write different versions for different browsers. On the other hand, web authors are lucky - if they only consider Internet Explorer, they will possibly cover 4/5 of the audience, and if they are kind enough to consider Mozilla users, they will almost cover them all. We are not that lucky. We can not assume that there are only Explorer-like living rooms and Mozilla-like living rooms. They are different, in terms of available components and connections. It is impossible to have one version to fit them all. Instead we should have only one abstract media description for all living rooms, then map the media needs to every physical room, to create the experience for end users as intended as possible. Similar mapping problems are studied informally in [10].
We aim at the formalization of such mapping problems. Each mapping problem is defined by a set of media needs and a set of presentation resources. The media needs are abstract description of the media content as well as its requirements for the physical components and their connections, including for example audiovisual players, robotic interactors and lights. These physical components are presentation resources. We employ Broy’s stream-based component framework [2]. The following issues must be addressed:
- 1.
- component interfaces for control and for events;
- 2.
- user interfaces: touch screens, switches and buttons;
- 3.
- throughput requirements and network delays;
- 4.
- embedding of presentation components into devices;
- 5.
- standardization of specifications (keeping the math away from the media developers).
The formalization will serve as a helpful framework for the development of an automated mapper that can handle real media needs and real presentation resources.
The mapping is to find the presentation resources for a set of media so that each media content is properly presented. In a typical implementation a mapping is a process that at run-time deals with control and events, and that has access to a number of reserved presentation resources. A presentation could be built by a “mapping server”, which behaves as a factory [3], launching presentations. Of course the mapping server takes a mapping problem (= media needs + presentation resources) as its input, solves the mapping problem, makes the reservations, and then builds and launches the presentation. In fact, a presentation could be structured as a main process by the mapper server, upwards serving the media needs, and several distributed and auxiliary processes downwards employing the local resources from the devices in the environment. Typically, a distributed presentation is built by a local server (also a factory). Although one may expect that one such server per device would be sufficient, this is actually not the case; the reason is that several mutually incompatible software abstractions exist upon the the same device (for example, the Real player and the Microsoft media player on a Windows PC).
2 Preliminaries
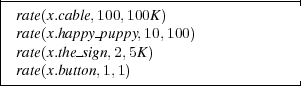
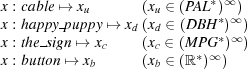
To get started we consider a few simple media needs:
- high-resolution video presentation
- low-resolution video presentation
- dancing behavior
- up-down interactor
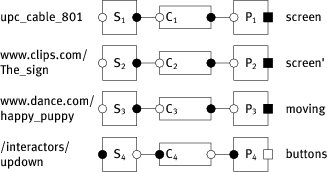
which have to be obtained from the following resources:
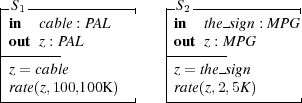
- cable: upc cable 801(10Mb/s)
- the__sign: www.clips.com/the__sign.mpg (10Kb/s)
- happy__puppy: www.dance.com/happy__puppy.dhb (1Kb/s)
- updown: /interactors/updown.exe (1b/s).
To model the media needs and presentation resources, we
follow the approach of Broy [2] based on timed streams. We
have some drawing conventions of our own, which is derived
from ADL Darwin [5, 4]. We use
 instead of
instead of
 (See [2],
p.7).
(See [2],
p.7).
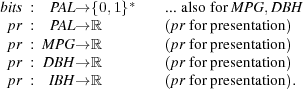
In an interactive presentation system, it is necessary to distinguish user interface channels from data streaming channels. For this we add another convention, namely output channels ■ modeling real, physical presentations such as sounds, video frames and robotic movements, and input channels □ modeling the components with which the user may interact with the system, such as a GUI interface on a screen and physical buttons on a remote control.
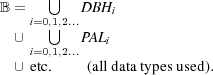
Broy demands that a set S of types be given. We put

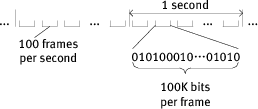
In Broy’s approach there is a discrete time frame representing time as an infinite chain of time intervals of equal finite duration. We take 1 second for that duration. This allows us to formally represent the facts for example that there are 25 video frames per second in a high-resolution video stream and that each frame takes a number of bits.
We assume functions on data:

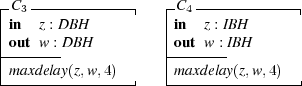
In order to map this we must assume devices and connections. Figure 3 shows a possible configuration with the following devices:
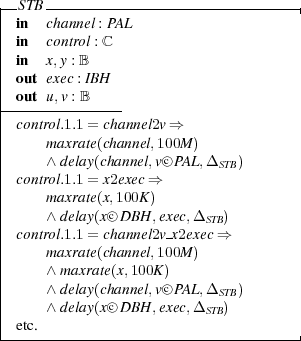
- STB: set-top box;
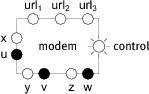
- modem: internet modem;
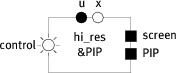
- hi__res&PIP: high-resolution monitor with picture-in-picture function;
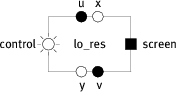
- lo__res: low-resolution (lo__res) monitor;
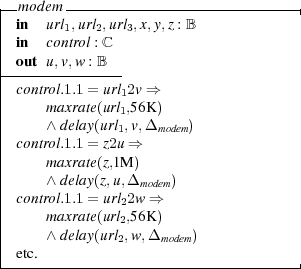
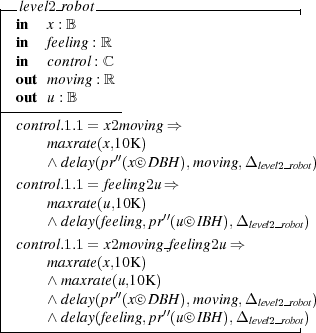
- level2_robot: “level-2” robot;
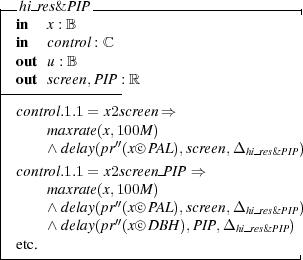
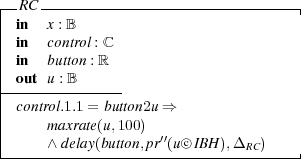
- RC: remote control for the low-resolution monitor
and the following connections:
- STB - modem 100b/s duplex;
- STB - hi__res 100Mb/s duplex;
- modem - lo__res 1Mb/s duplex;
- modem - robot 10Kb/s duplex;
- RC - lo__res 100b/s duplex.
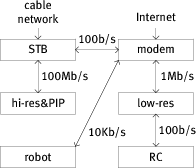
There are two possible ways of presenting the dancing behavior: either by an animated character on the PIP of the hi__res screen, or by the physical robot together with the RC providing user input. But the STB - modem bandwidth is not enough for the PIP to do it. So the robot must dance and the RC must provide the up-down interaction.
3 Specification
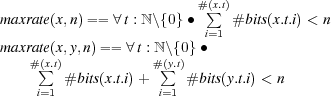
We need some abbreviations. For timed stream z and n1, n2 ∈ ℕ,

For timed streams x and x′, and Δ ∈ ℕ,


The rate information is put into the source devices S1, S2, S3 and the sink S4.
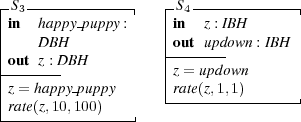
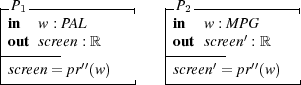
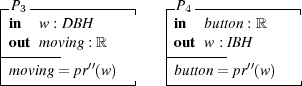
The relation between media formats and the real world is described in P1,..., P4.
Matters of delay are modelled in the channels.
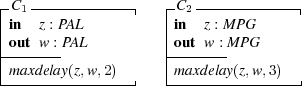
Finally the whole system is specified by:

4 Presentation resources
The next step is to formalize the presentation resources, i.e. the components and the network connections. We assume that the components cause delays and that the connections give rise to bandwidth restrictions. The structure of the resulting model is shown in Figure 5. Clearly we will need renaming later, for example, [the__sign∕url1] (for modem) and [cable∕channel] (for STB).
Somehow the components must be configured to perform the required routing of streams. Although the current mapping-example does not require it, in general a component must be able to combine two incoming streams and put them on a single output port, or conversely, split what comes in to produce separate outgoing streams. In other words, some components must contain a switch.
A component containing a switch must have an extra channel of a special type, a control channel, accepting so-called commands, from a set ℂ. So from now on,

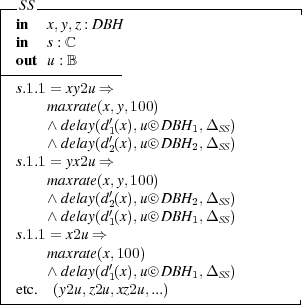
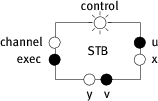
To get some experience in modelling switches, we try a simplified component, the Simple Switch SS:
 (x, y, z : DBH)
(x, y, z : DBH)
Any selection from x, y and z can be combined and offered on u, provided the rates fit. To adapt to the rate of u, which is assumed to be fixed, dummy data must be stuffed.
We assume the existence of disjoint copies of the set DBH, which we denote DBH1, DBH2, etc. We also assume conversion functions d1 : DBH → DBH1, d2 : DBH → DBH2, etc. and the corresponding inverses, e.g. d1-1 : DBH1 → DBH. They give rise to lifted versions, e.g. d1′ : DBH*→ DBH1*. These assumptions allow us to specify streams being merged, e.g. x and y merged into u:

 means the stream obtained from x by
deleting all its messages that are not elements of the set
S.)
means the stream obtained from x by
deleting all its messages that are not elements of the set
S.)
We introduce abbreviations:
Although a real network connection carries bits, we use a more abstract model to reflect the general-purpose nature of connections:
On the basis of this example, we consider the real
components, assuming the real delay occurs in the
components as show in the following table. This means that a
constraint such as delay(x, u,ΔSS) has to be rewritten as
 . We assume that the delay is
fixed, independent of the load and the precise routing.
Otherwise, more sophisticated schemes can be devised if
necessary. Note that
. We assume that the delay is
fixed, independent of the load and the precise routing.
Otherwise, more sophisticated schemes can be devised if
necessary. Note that  is the lifted version of
is the lifted version of  . The rate
constraints are modelled as if they belong to the input ports.
. The rate
constraints are modelled as if they belong to the input ports.
component | delay | value |
| STB | ΔSTB | 1 |
| modem | Δmodem | 1 |
| hi__res | Δhi__res | 1 |
| lo__res | Δlo__res | 1 |
| level2__robot | Δlevel2_robot | 0 |
| RC | ΔRC | 0 |
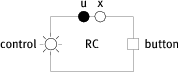
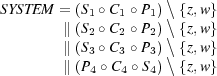
5 Mapping
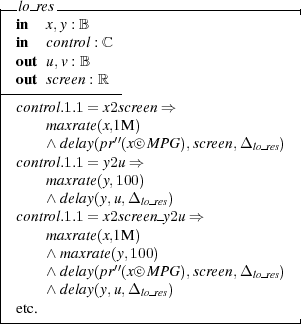
Next we propose a mapping. Abstractly, a mapping is a set of paths through a given network, one path for each of the four chains specified in SYSTEM. At a concrete level, the paths are established by feeding appropriate switching commands into STB, modem and lo__res. In general there is a freedom in choosing these paths, for example if alternative routing through the network exists. Even the choice of which screen or interactive input is to be used is not a priori fixed. The four paths are shown in Figure 6. In an informal way it is easy to check that the delay and bandwidth constraints are not violated and the mapping is feasible.
Media needs | ∑Δ | Required∑Δ | |
| path1 | cable | 2 | ≤ 2 |
| path2 | the__sign | 1 | ≤ 3 |
| path3 | happy__puppy | 1 | ≤ 4 |
| path4 | updown | 3 | ≤ 4 |
To formalize the connections we use renaming by adapting port names to “wire names”. The wire names are also shown in Figure 6. Note that w4a, w4b and w4c together form a path from RC via lo__res and modem to STB. The other wire names are not used. Unused ports must be hidden and ports that go to the external world must be renamed.
![ST B′ = STB[cable∕channel,
updown∕exec,w4 c∕x,w1∕v]
≪ control : channel2v x2exec
\{control,x,y}
hi-res& PIP′ = hi res& PIP[w1∕x]
≪ control : x2screen
′\{control,u,PIP}
RC = RC [w4a∕u]
≪ control : button2u
\{control,x}
lo-res′ = lo res[w4a∕y,w4b∕u,w2∕x,screen′∕screen]
≪ control : x2screen y2u
\{control,v}
modem′ = modem [happy-puppy∕url1,the sign∕url2,
w4c∕u,w3∕v,w4b∕z,w2∕w]
≪ control : url12v url22w z2u
\{control,url }
′ 3
level2-robot = level2 robot[w3∕x]
≪ control : x2moving
\{control,u,feeling}](Mapping_case_44x.png)
Finally the whole system implementation is described by


6 Correctness
The next questions is: how to express the formal correctness of the implementation?
Broy proposes three ideas of refinement: property refinement, glass box refinement, and interaction refinement. The glass box refinement is a classical concept of refinement typically used to decompose a system with a specified black box behavior into a distributed system architecture in the design phase, which seems appropriate in our case. The general form of a glass box refinement is

 ⊆ F stands
for the proposition
⊆ F stands
for the proposition


Also recall the definition of ⊕ for F1 ⊕ F2

Let RATE′ be given by
Note that this is essentially the same as S1,..., S4 are saying about their z ports.
Consider an arbitrary x satisfying RATE′ where  where I′ is {cable,...}. x is a channel valuation x : I′→ (M*)∞
such that
where I′ is {cable,...}. x is a channel valuation x : I′→ (M*)∞
such that

Since I′ has only four elements, we can write this out by assuming
Now this x satisfies RATE′, that is, xu has 100 frames per second, each frame being 100K bits, etc. (And similarly, xd: 10, 100 respectively, xc: 2, 5K respectively and xb: 1, 1 respectively.)
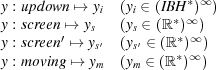
Let y ∈ SYSTEM′.x where  where O′ is {screen,
screen′, moving, updown} which we write out by assuming
where O′ is {screen,
screen′, moving, updown} which we write out by assuming
The correctness requirement is

The obvious proof strategy is to take an arbitrary x satisfying RATE′ and consider a y ∈ SYSTEM′.x, i.e.

As an example we check that ys satisfies all constraints of
SYSTEM.x. Since SYSTEM falls apart in 4 unconnected parts, it
is enough to check that ys = y.screen satisfies the the constraints
of (S1 ∘ C1 ∘ P1)\{z, w}:



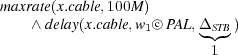
What we know about ys comes from RATE′∧ SYSTEM′ which for RATE′ means rate(cable,100,100K). For SYSTEM′, its meaning is more complicated. First, note that

 ), where
), where
![ST B′ = STB[cable∕channel,w1 ∕v,...]
≪ control : channel2v x2exec
\{control,x,y}
hi-res& PIP′ = hi res& PIP[w1∕x]
≪ control : x2screen
\{control,u,PIP}](Mapping_case_65x.png)
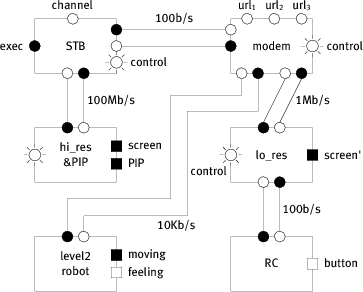
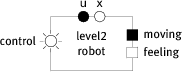
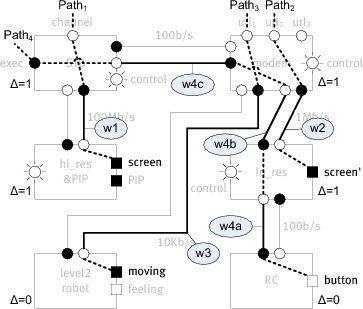
Note that for ys it suffices to focus on STB′ and hi__res&PIP and forget about all other channels than w1 where ⊕ can be replaced by ∘, i.e.

We summarize the assertions from SYSTEM′ by performing the renamings and keeping only the relevant clauses in view of the chosen control command. STB′ says:





Next we check the delays. We combine the two one-step delay assertions, first by noting that pr′′ works frame-wise:



7 Concluding remarks
The case study shows how Broy’s framework can deal with special interfaces for control and events at an abstract level and with real-world interfaces. It can also deal with bandwidth requirements and network delays very well. The case study does not have a sophisticated performance model, but it is plausible that certain models can be made using the same modelling style (for example if the delay is a function of the bit rate).
The case study shows one specification and one configuration of presentation resources. Abstractly, the mapping between the two is a set of paths through the network. Concretely, a mapping is a set of control commands, to be given to those components that have switching capabilities. Maximal rate and delay requirements can be checked formally, although the calculations are not surprising. Media types are described by sets such as PAL and MPG, this implies that type compatibilities are handled formally too.
The model created focuses on the stream-based aspects; in this type of distributed systems these aspects are most important at the architectural level. At a protocol level, we expect that reactive behavior is most important, and complementary state-machine based models could be used [12].
The following research questions remain as options for future research:
- 1.
- How to model dynamic aspects such as changing configurations and servers that build presentations according to the “factory” paradigm;
- 2.
- How to scale-up the approach when more and more technicalities have to be modelled (while keeping the math away from media developers);
- 3.
- How to specify the general class of “mapping problems” (instead of a single instance, as we did now).
Acknowledgement
The authors would like to thank Emile Aarts and Maddy Janse from Philips Research Eindhoven for their support on the work and Yuechen Qian for his comments on the early draft of this paper.
References
[1] E. Aarts and S. Marzano. The New Everyday View on Ambient Intelligence. Uitgeverij 010 Publishers, 2003.
[2] M. Broy. A logical basis for component-based systems engineering. In M. Broy and R. Steinbr uggen, editors, Calculational System Design. IOS Press, 1999.
[3] F. Buschmann, R. Meunier, H. Rohnert, P. Sommerlad, and M. Stal. Pattern-Oriented Software Architecture, A System of Patterns. John Wiley & Sons, Inc., Chichester, UK, 1996.
[4] W. Eixelsberger and H. Gall. Describing software architectures by system structure and properties. In COMPSAC ’98 - 22nd International Computer Software and Applications Conference, pages 106–111, Vienna, Austria, 1998. IEEE Computer Society.
[5] L. M. G. Feijs and Y. Qian. Component algebra. Science of Computer Programming, 42(2-3):173–228, 2002.
[6] J. Hu and L. M. G. Feijs. An adaptive architecture for presenting interactive media onto distributed interfaces. In The 21st IASTED International Conference on Applied Informatics (AI 2003), pages 899–904, Innsbruck, Austria, 2003. ACTA Press.
[7] J. Hu and L. M. G. Feijs. An agent-based architecture for distributed interfaces and timed media in a storytelling application. In The 2nd International Joint Conference on Autonomous Agents and Multiagent Systems, pages 1012–1013, Melbourne, Australia, 2003.
[8] IBC. The world of content creation, management and delivery, 2003. Available from: http://www.ibc.org.
[9] ICE-CREAM. The ice-cream project homepage, 2003. Available from: http://www.extra.research.philips.com /euprojects /icecream/.
[10] C. Kray, A. Krüger, and C. Endres. Some issues on presentations in intelligent environments. In E. Aarts, R. Collier, E. van Loenen, and B. de Ruyter, editors, First European Symposium on Ambient Intelligence (EUSAI), pages 15–26, Veldhoven, The Netherlands, 2003. Springer.
[11] NexTV. The nextv project homepage, 2001. Available from: http://www.extra.research.philips.com /euprojects /nextv.
[12] A. Ulrich and H. König. Specification-based testing of concurrent systems. In A. Togashi, T. Mizuno, N. Shiratori, and T. Higashino, editors, Joint International Conference on Formal Description Techniques for Distributed Systems and Communication Protocols (FORTE 1997), pages 7–22. &Hall, 1997.
